
優(yōu)化放大器電路中的輸入和輸出瞬態(tài)穩(wěn)定時(shí)間
關(guān)鍵詞: 放大器電路 瞬態(tài)穩(wěn)定時(shí)間 Riso+DFB電路 反饋比優(yōu)化 運(yùn)算放大器
優(yōu)化放大器電路中的輸入和輸出瞬態(tài)穩(wěn)定時(shí)間
運(yùn)算放大器電路通常在執(zhí)行系統(tǒng)功能時(shí)需要響應(yīng)輸入和輸出瞬態(tài)。部分電路主要設(shè)計(jì)用于接受不同的輸入瞬態(tài),如傳感器信號(hào)調(diào)節(jié)電路;而其他電路則提供輸出瞬態(tài),例如模數(shù)轉(zhuǎn)換器 (ADC)輸入或基準(zhǔn)驅(qū)動(dòng)器。在運(yùn)算放大器電路設(shè)計(jì)中,同一電路的輸出(負(fù)載)階躍與輸入階躍的輸出穩(wěn)定響應(yīng)時(shí)間的差異經(jīng)常被忽視。
在大多數(shù)電路中,輸出負(fù)載直接連接到運(yùn)算放大器的輸出端;響應(yīng)時(shí)間在很大程度上基于運(yùn)算放大器對(duì)所需負(fù)載瞬態(tài)及后續(xù)恢復(fù)提供支持的能力。然而,該行為取決于電路拓?fù)洹T谶\(yùn)算放大器輸出電壓 (Vopa)不直接連接到負(fù)載的電路中,輸出穩(wěn)定響應(yīng)會(huì)與輸入響應(yīng)大不相同。在放大器必須驅(qū)動(dòng)容性負(fù)載 (Cload)的情況下,此類電路的一個(gè)常見(jiàn)示例是具有雙反饋 (Riso+DFB) 電路拓?fù)涞母綦x電阻器。在 Vopa 和 Cload 網(wǎng)絡(luò)之間使用隔離電阻器 (Riso)并存在從反饋電容器 (Cf)和反饋電阻器 (Rf)返回反相輸入 (IN-)的兩個(gè)反饋路徑,此電路也因此得名。
圖 1-1 顯示了一個(gè)用于驅(qū)動(dòng)容性負(fù)載 (Cload) 的 Riso+DFB 電路示例。輸入端直接連接到電壓源,因此運(yùn)算放大器必須對(duì)輸入端發(fā)生的變化做出反應(yīng)。在含有一個(gè)簡(jiǎn)單的開(kāi)關(guān) (SW1) 和電阻負(fù)載 (Rload) 的基本情況下,放大器電路必須對(duì)輸出端出現(xiàn)的負(fù)載瞬態(tài)做出響應(yīng)。
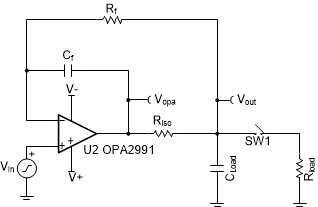
圖 1-1 具有雙反饋的 Riso原理圖
圖 1-2 中的兩個(gè)仿真電路展示了輸入階躍和負(fù)載瞬態(tài)輸出響應(yīng)之間的差異。圖 1-2(a) 將輸入電壓階躍應(yīng)用于電路的輸入端,而 圖 1-2(b) 將負(fù)載電流階躍應(yīng)用于輸出端。在負(fù)載瞬態(tài)電路中,通過(guò)將流經(jīng)Riso (Iload x Riso)的負(fù)載電流 (Iload)形成的輸出壓降設(shè)置為與輸入階躍幅度相等,將兩個(gè)電路中 Vopa 的初始變化設(shè)置為10mV,從而實(shí)現(xiàn)同級(jí)比較。10mV 的輸出階躍幅度可防止運(yùn)算放大器出現(xiàn)大信號(hào)趨穩(wěn)行為,例如壓擺率限制。此外,輸出電流必須足夠小,以防止運(yùn)算放大器進(jìn)入大信號(hào)短路電流限制范圍。
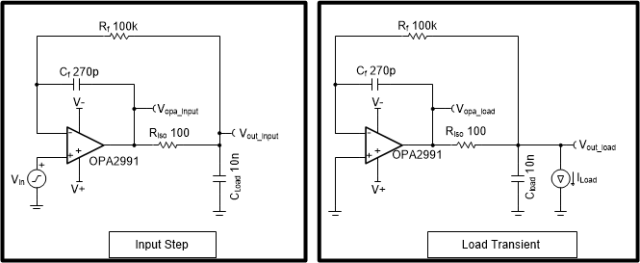
圖 1-2 輸入階躍 (a) 和負(fù)載瞬態(tài) (b) 仿真電路
圖 1-3 顯示了兩個(gè)仿真電路的結(jié)果。按照設(shè)計(jì),針對(duì)輸入和輸出響應(yīng),Vopa 的初始變化均為 10mV。但是負(fù)載輸出電壓 (Vout) 穩(wěn)定所需的時(shí)間在兩個(gè)電路之間是不同的;輸入階躍電路的趨穩(wěn)速度比輸出負(fù)載瞬態(tài)階躍電路快得多。例如,若要穩(wěn)定到 0.05%(相當(dāng)于 10 位),輸入階躍電路需要 5.02μs,輸出負(fù)載瞬態(tài)電路需要 189.42μs。
表 1-1 列出了圖 1-2 中輸入階躍電路和負(fù)載瞬態(tài)階躍電路要實(shí)現(xiàn)10 至 18 位分辨率采集系統(tǒng)所需的輸出穩(wěn)定時(shí)間之間的差異。由于不同的輸出阻抗和開(kāi)環(huán)增益曲線會(huì)造成更加細(xì)微的影響,測(cè)試備選運(yùn)算放大器將獲得不同的穩(wěn)定響應(yīng)。
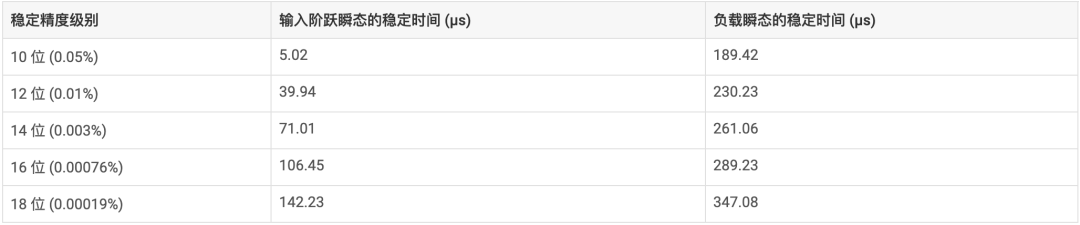
表 1-1 不同穩(wěn)定精度水平的輸入和輸出瞬態(tài)穩(wěn)定時(shí)間
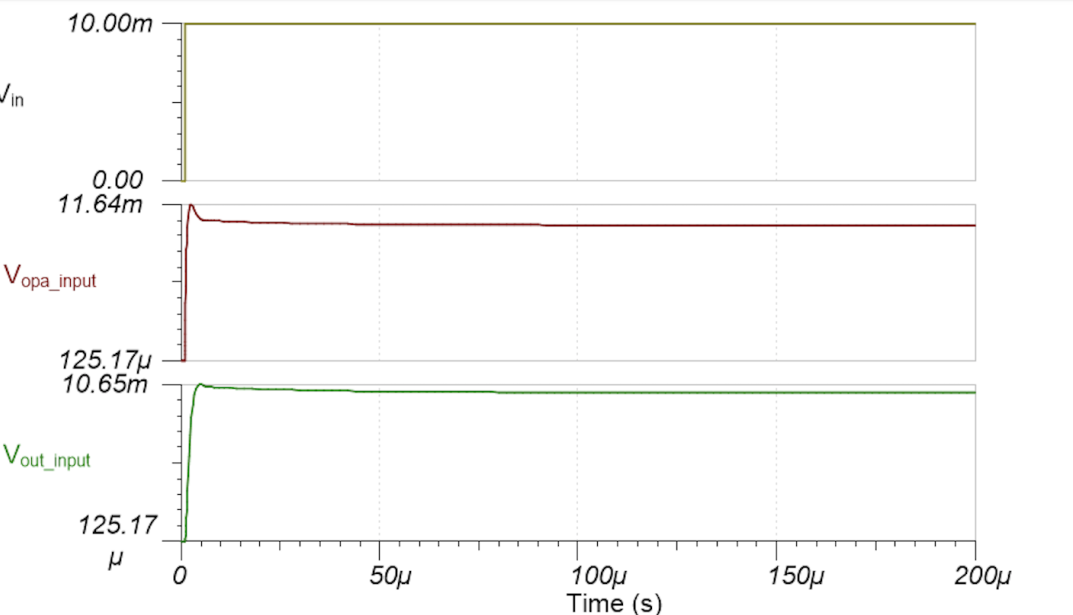
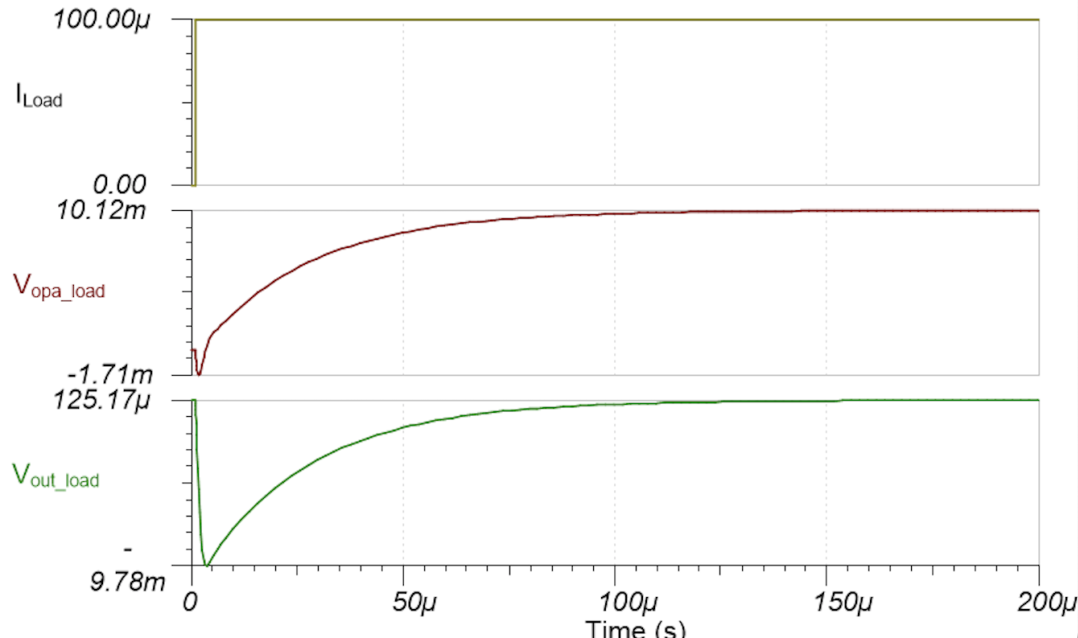
圖 1-3 輸入階躍 (a) 和輸出負(fù)載瞬態(tài) (b) 電路的
輸出穩(wěn)定響應(yīng)
圖 1-4 顯示了對(duì)輸入和輸出瞬態(tài)的輸出穩(wěn)定響應(yīng)起主導(dǎo)作用的元件,如紅色箭頭所示。對(duì)于輸入階躍瞬態(tài),Riso和 Cload電阻-電容 (RC) 時(shí)間常數(shù)決定了輸出穩(wěn)定時(shí)間。發(fā)生輸入階躍時(shí),Vopa立即響應(yīng)輸入電壓階躍。隨著運(yùn)算放大器輸出電壓升高,Vout會(huì)因 Riso和 Cload而出現(xiàn)延遲。
對(duì)于負(fù)載瞬態(tài),Rf 和 Cf RC 時(shí)間常數(shù)決定了輸出穩(wěn)定響應(yīng)。發(fā)生負(fù)載瞬態(tài)時(shí),Vout立即下降10mV (Risox Iload)。Vopa響應(yīng) Vout下降所需的時(shí)間取決于 Rf和 Cf產(chǎn)生的 RC 延時(shí)時(shí)間。
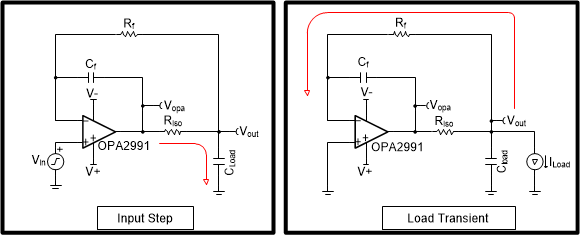
圖 1-4 主導(dǎo)輸入階躍 (a) 和輸出負(fù)載 (b) 瞬態(tài)響應(yīng)的
RC 時(shí)間常數(shù)
圖 1-5 將輸入階躍和負(fù)載瞬態(tài)輸出穩(wěn)定時(shí)間(底部響應(yīng))與前文所述的起主導(dǎo)作用的RC 時(shí)間常數(shù)(頂部響應(yīng))進(jìn)行了比較。圖 1-5F(a) 將 Vout的輸入階躍穩(wěn)定時(shí)間與具有100Ω電阻器和10nF電容器(Riso和 Cload)的 RC 電路響應(yīng)進(jìn)行了比較。圖 1-5(b) 將輸出瞬態(tài)穩(wěn)定時(shí)間與具有100kΩ電阻器和270pF電容器(Rf和 Cf)的 RC 電路響應(yīng)進(jìn)行了比較。RC 電路上升時(shí)間與輸入階躍和負(fù)載瞬態(tài)輸出穩(wěn)定響應(yīng)一致,從而證實(shí)了上述理論。
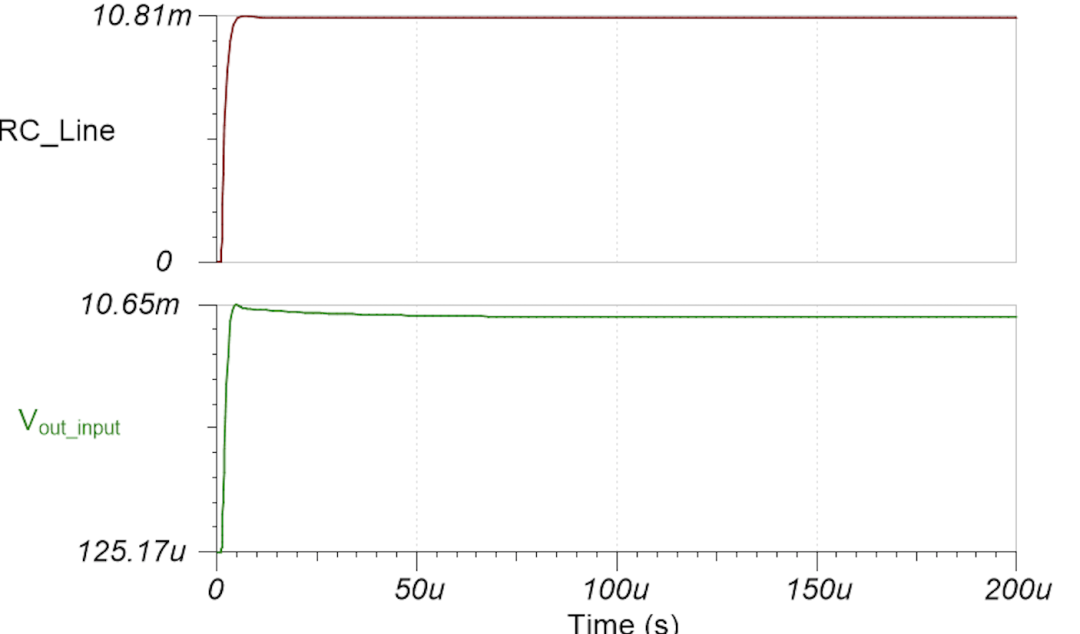
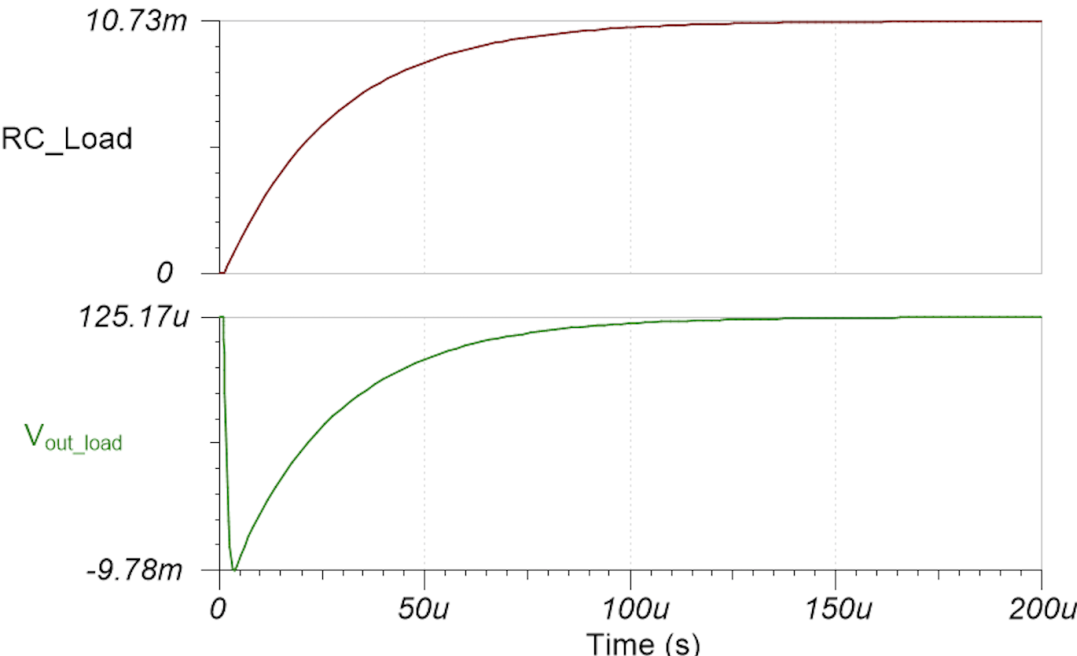
圖 1-5 輸入階躍 (a) 和輸出負(fù)載 (b) 瞬態(tài)穩(wěn)定時(shí)間
(RC 時(shí)間常數(shù)起主導(dǎo)作用)
下文將討論Riso+DFB 電路的穩(wěn)定性標(biāo)準(zhǔn),并介紹如何優(yōu)化反饋比,以獲得更好的負(fù)載瞬態(tài)穩(wěn)定時(shí)間。首先,運(yùn)算放大器作為單位增益緩沖器,必須穩(wěn)定驅(qū)動(dòng) Riso+Cload組合。其次,由 Rf和 Cf形成的 1/Beta 極點(diǎn)必須至少小于來(lái)自 Riso 和 Cload 的零點(diǎn)頻率的一半。
·單位增益緩沖器驅(qū)動(dòng) Risox Cload的相位裕度:>45°
·反饋比:(Rfx Cf)/(Risox Cload) > 2
雖然穩(wěn)定運(yùn)行的反饋路徑的最小比率為2,但穩(wěn)定電路沒(méi)有最大比率。只要滿足第一個(gè)標(biāo)準(zhǔn),反饋路徑比率可穩(wěn)定保持在 10、100 甚至 1,000,并具有類似的相位裕度結(jié)果。然而,如 圖 1-5 所示,輸出負(fù)載響應(yīng)基于由 Rf和 Cf元件形成的時(shí)間常數(shù)。因此,雖然穩(wěn)定,但較大的比率將導(dǎo)致負(fù)載響應(yīng)比輸入響應(yīng)慢得多。
圖 1-6 顯示了輸出穩(wěn)定響應(yīng)如何隨改變(Rfx Cf)/(Risox Cload)的比率而化變。當(dāng)反饋比接近最小標(biāo)準(zhǔn) 2 時(shí),輸入階躍和輸出負(fù)載瞬態(tài)的輸出響應(yīng)幾乎相等,但會(huì)增加一些過(guò)沖和振鈴。增加 (Rfx Cf)/(Risox Cload) 的比率會(huì)產(chǎn)生更大的阻尼輸出,一旦比率大于 20,該輸出對(duì)輸入階躍響應(yīng)的影響最小。然而,該比率對(duì)Rfx Cf時(shí)間常數(shù)起主導(dǎo)作用,因此較大的比率會(huì)繼續(xù)增加負(fù)載瞬態(tài)輸出響應(yīng)時(shí)間。
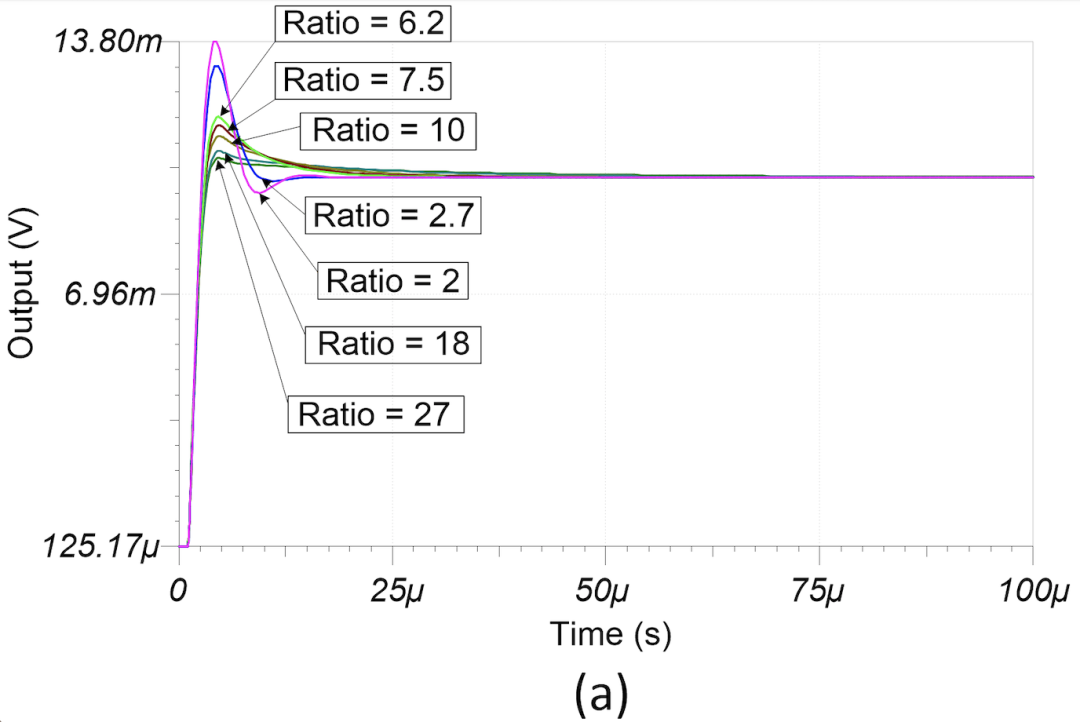
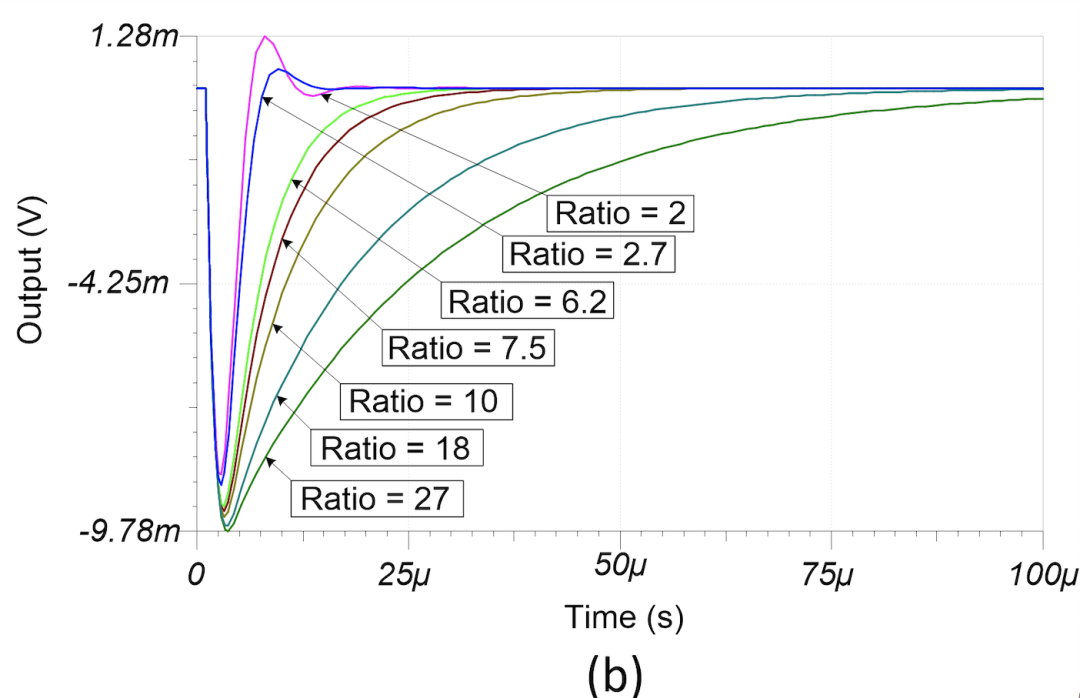
圖 1-6 輸入階躍(頂部)和輸出負(fù)載(底部)瞬態(tài)的
多個(gè)比率的輸出穩(wěn)定響應(yīng)
因此,為了在響應(yīng)輸出負(fù)載瞬態(tài)時(shí)實(shí)現(xiàn)卓越性能,應(yīng)在設(shè)計(jì)電路時(shí)采用接近 2 的 (Rfx Cf)/(Risox Cload) 比率。由于運(yùn)算放大器特性與電路元件和多樣性之間的相互作用將導(dǎo)致某些組合低于目標(biāo)比率,更保守的設(shè)計(jì)方法將此比率設(shè)置在4 和 10 之間。反饋元件比率低于 2 將影響電路的穩(wěn)定性。
這種效應(yīng)發(fā)揮作用的一個(gè)實(shí)際例子是 ADC 基準(zhǔn)驅(qū)動(dòng)電路,如圖 1-7 所示。
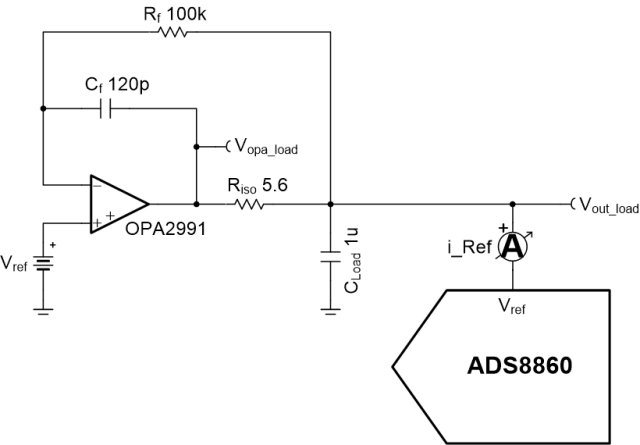
圖 1-7 ADC 基準(zhǔn)驅(qū)動(dòng)電路
在 ADC 的轉(zhuǎn)換階段,逐次逼近過(guò)程中會(huì)將內(nèi)部電容器數(shù)模轉(zhuǎn)換器 (CDAC)組切換到電路中。每次新的電容器切換到電路中時(shí),外部驅(qū)動(dòng)電路所需的電流突發(fā)將作為負(fù)載瞬態(tài)出現(xiàn)。因此,如果沒(méi)有正確配置電路反饋比,Riso+DFB 電路可能無(wú)法正確穩(wěn)定至負(fù)載響應(yīng)。
圖 1-8 顯示了電路仿真中的上述效應(yīng),其中使用 圖 1-7 中的運(yùn)算放大器電路作為ADS8860的基準(zhǔn)緩沖器,ADS8860 是一個(gè)16 位逐次逼近寄存器 ADC,在本示例中配置為以 100kSPS 的速率進(jìn)行采樣。將電路中的反饋路徑比值從大約3.6變化到360顯示了負(fù)載穩(wěn)定時(shí)間的差異。正如圖 1-5 中的結(jié)果所預(yù)期,具有較高比率的電路需要更長(zhǎng)的時(shí)間使基準(zhǔn)緩沖器電路達(dá)到平衡,從而導(dǎo)致轉(zhuǎn)換之間的最低有效位穩(wěn)定誤差小于 1/2。
最低模擬比率 – 圖 1-8(a) 中的 3.6 – 需要大約四個(gè)樣本達(dá)到平衡,而圖 1-8(c) 中比率為 360,需要超過(guò) 400 個(gè)樣本(或大約 4ms)電路才能達(dá)到平衡,這很好地說(shuō)明這一點(diǎn)。應(yīng)用通常采用間歇性的樣本突發(fā),對(duì)于具有圖 1-8(c) 所示結(jié)果的電路可能不會(huì)在樣本突發(fā)完成之前完全達(dá)到平衡。不穩(wěn)定的基準(zhǔn)會(huì)導(dǎo)致出現(xiàn)轉(zhuǎn)換錯(cuò)誤和 AC 性能下降。如前所述,比率為 3.6 和 360 的電路的相位裕度和輸入響應(yīng)幾乎相同;如果您沒(méi)有正確設(shè)計(jì)電路并驗(yàn)證輸出負(fù)載響應(yīng),則可能會(huì)出現(xiàn)意外的電路結(jié)果。
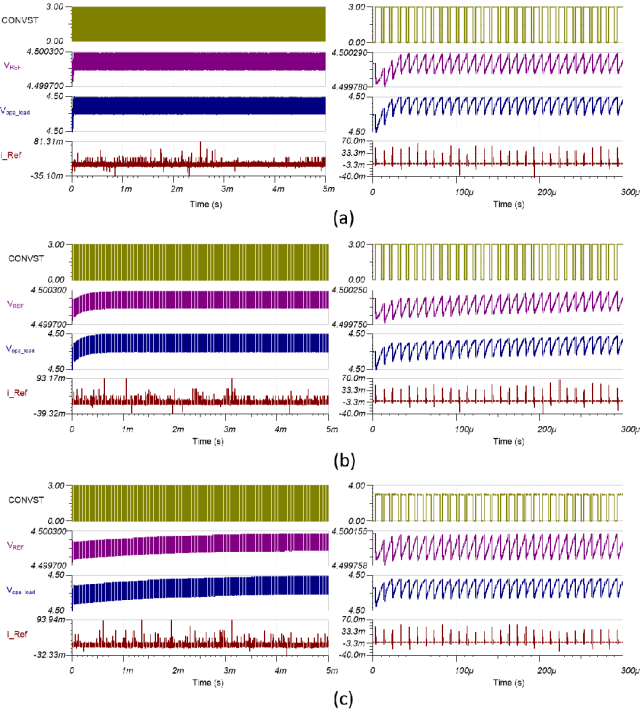
圖 1-8 不同反饋比率的 ADC 基準(zhǔn)驅(qū)動(dòng)趨穩(wěn):
3.6 (a);36 (b);和 360 (c)。左圖和右圖分別顯示了
5ms 時(shí)間標(biāo)度和 300μs 時(shí)間標(biāo)度,結(jié)果相同。
結(jié)論
包括 ADC 輸入和 ADC 基準(zhǔn)電壓驅(qū)動(dòng)器在內(nèi)的應(yīng)用需要使用運(yùn)算放大器電路對(duì)輸出負(fù)載瞬態(tài)和輸入階躍瞬態(tài)進(jìn)行響應(yīng)。這些應(yīng)用中經(jīng)常使用的 Riso+DFB 電路拓?fù)湓谳敵龊洼斎腚A躍的輸出穩(wěn)定響應(yīng)時(shí)間上會(huì)存在很大差異,具體取決于所選的電路值和比率。如果用戶在設(shè)計(jì)這些電路時(shí)僅使用輸入階躍進(jìn)行電路分析,則輸出負(fù)載穩(wěn)定可能會(huì)出現(xiàn)意外結(jié)果,從而對(duì)應(yīng)用產(chǎn)生負(fù)面影響。因此,在設(shè)計(jì)電路時(shí),必須同時(shí)響應(yīng)輸入階躍瞬態(tài)和輸出負(fù)載瞬態(tài)。驗(yàn)證對(duì)兩種瞬態(tài)類型的穩(wěn)定響應(yīng)是否滿足電路穩(wěn)定要求,這不失為一個(gè)好方法。
網(wǎng)址:www.baitaishengshi.com






